

产品详细
详细使用和保护的事例,满意咱们的要求。今日咱们来谈一谈怎么使用PLC来完成简略的搬运动作,让
这个比如使用到了次序操控的指令,实在的操作起来真的是十分快捷,程序循环操控也很流通!
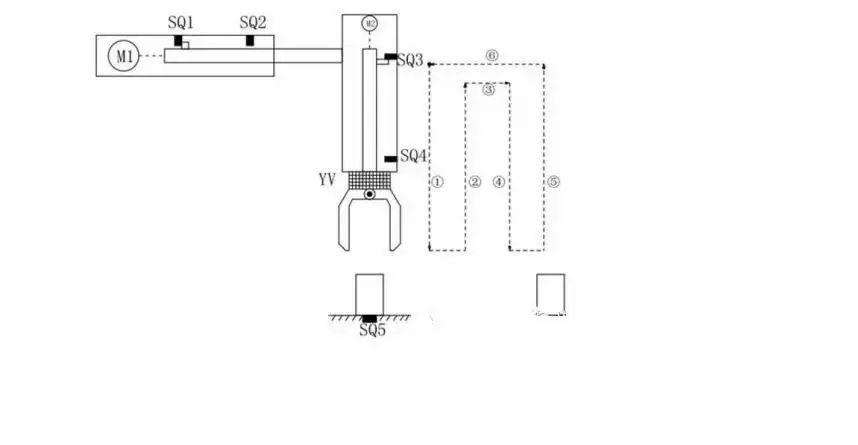
机械手的初始状况(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
若原点条件满意且SQ5闭合(工件A处有工件),按下发动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的过程作业。
这么多梯形图看着真是头晕目眩,接下来咱们一段一段剖析剖析这个机械手是怎么作业的,其实这个图没那么多的并行分支,所以搬运起来逻辑十分简略!
文章出处:【微信号:中泰PLC自动化教育,微信大众号:中泰PLC自动化教育】欢迎增加重视!文章转载请注明出处。
结构选用ATmega16 8位单片机,使用Proteus与Atmel Studio6.0软件进行
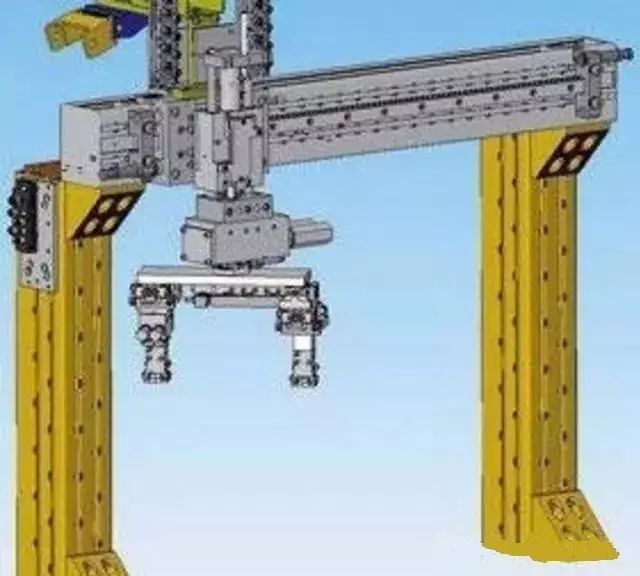
的、多功能的、多自由度的、运动自由度间成空间直角联系、多用途的操作机。它可以
体系选用 ARM9+FPGA ,全工业级规划,上位机10寸触摸屏便利人机交互,电子脉冲手轮用于示教
中较为先进和使用最为遍及的可以较大程度替代人工的自动化设备。四元数关节式
中的使用 /
homebridge-smartthings SmartThings插件