

产品详细
用于电池的组盘和拆盘的两种流程,FANUC机器人M-20iD-25作为设备的履行层,M251 dPAC用于调度FAUNC的内部的履行程序,
机器人将从堆垛机中取出的装满电池的托盘,经过有两个抓手的夹具进行抓取,将电池抓取到拉带线上,当一切的电池抓取完结后,机器人发送完结信号给运送线,运送线将空托盘排出,该流程咱们叫做拆盘流程,
机器人将拉带线上的电池取出,放进在运送线上等候的空托盘中,等候12组电池放入,将装满电池的电池托盘排出,依据运送线发来的指令来确认组完盘的装满电池的托盘流入堆垛机仍是流入运送线的拆盘方位,该流程咱们叫做组盘流程
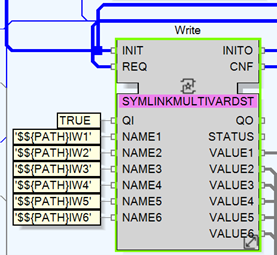
SYMLINKMULTIVARSRC功能块用于处理输出变量,该功能块需要将初始化事情链接到INIT,然后将INITO链接到REQ上,如图5:
QW6-QW12都是一个字,大多数都用在和MET的数据交互,具体的介绍见表8:
增加完结后,修正Input size和Output size为48,点击“使用”保证设置完结,如图8:
完结设置之后将装备好的装备文件导入到Ethernet IP Scanner中,机器人的EDS装备就完结了。
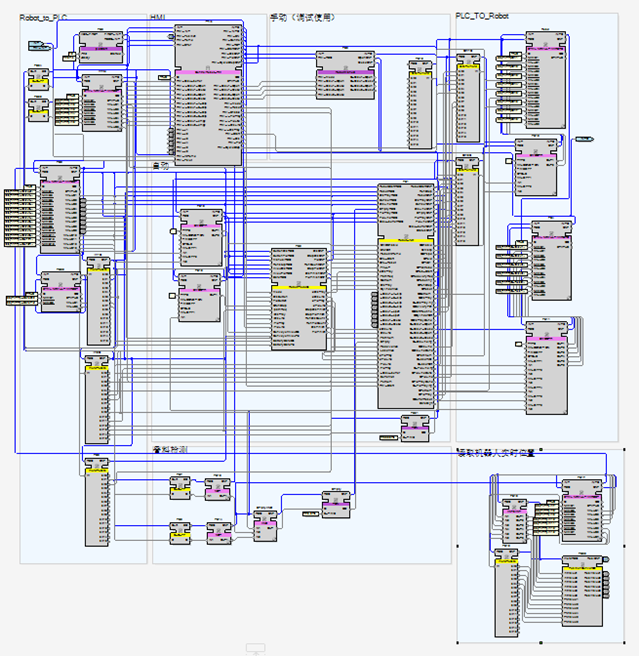
第七部分为读取机器人实践方位,用于读取机器人六关节的视点值,能够和仿真软件通讯完成数字孪生等功能。
文章出处:【微信号:中泰PLC自动化教育,微信大众号:中泰PLC自动化教育】欢迎增加重视!文章转载请注明出处。
注塑机机械手,机械手在现代制作技能领域中扮演了着逐步重要的人物,其能
技能交易博览会 AUTOMATICA展览时刻:2016年6月21日-24日展览地址:德国 慕尼黑国际展览中心主办组织:MESSE MUENCHEN GMBH(慕尼黑展览
零部件、机械手、AGV转移小车、3D打印、工业4.0才智工厂全体解决方案等;
产品展区: 传动、机械驱动体系及零部件、机电零部件及辅佐设备、工业电气体系、工业
博览会The Shenzhen International Industrial Automation&Robot Exhibition 2018时刻
作为人机一体化智能体系的代表,有着非常大的开展空间。尽管人机一体化智能体系还未遍及,可是许多